

L’effetto bullwhip: chi si occupa di supply chain ha familiarità con questo fenomeno – un piccolo cambiamento nella domanda a valle può creare grandi fluttuazioni a monte, e viceversa piccoli ritardi a monte possono creare un disastro per i partner della supply chain a valle.
Ciò crea distorsioni e tensioni lungo la catena di fornitura, con conseguenti interruzioni, extra-stock, e costi di expediting.
Forse non ti occupi di pianificazione di Supply Chain, ma potresti aver incontrato lo stesso effetto in un ingorgo stradale. Ti è mai capitato di rimanere bloccato in uno di quei gravi rallentamenti in autostrada senza una causa identificabile?
L’esperimento riprodotto nel video qui sotto su una strada circolare mostra come appaiono questi ingorghi fantasma.
Nel 2017, il MIT ha ripetuto lo stesso esperimento, ma ha inserito un’unica vettura dotata di cruise control adattivo nella coda. Si è scoperto che l’inserimento di questo singolo buffer nel sistema ha smorzato l’onda al punto che la congestione è effettivamente scomparsa. Purtroppo, il video non sembra più essere online, ma potete trovare maggiori dettagli su questo esperimento seguendo i link qui sotto.
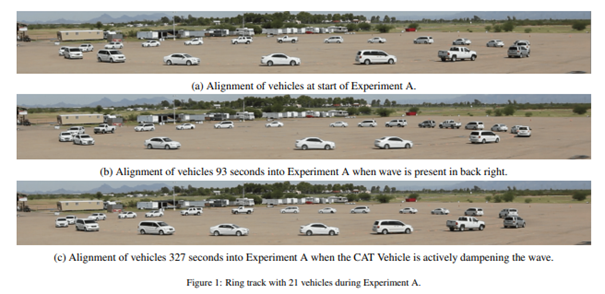
https://www.technologyreview.com/s/607841/a-single-autonomous-car-has-a-huge-impact-on-alleviating-traffic/
https://arxiv.org/pdf/1705.01693.pdf
Un esperimento simile è stato condotto dalla Ford e dalla Vanderbilt University nel 2018:
Ok, ma cosa c’entra questo con il mondo “Demand Driven”?
Beh, i buffer di stock e di tempo alla base del modello operativo Demand Driven si comportano come un cruise control adattivo: quando il buffer è troppo vuoto o troppo pieno, si eseguono regolazioni per adeguare il ritmo a monte e a valle del buffer.
I buffer non devono essere posizionati dappertutto, ma devono essere inseriti solo in determinate posizioni per smorzare la variabilità.
Questo permette di sincronizzare il flusso del valore con l’effettiva domanda e in armonia con i vincoli del vostro sistema.
E di conseguenza, i conducenti sono molto meno stressati.
Provateci!. (Mi riferisco ad usare l’Adaptive Cruise Control, voglio dire .)
Translated by Ivan Lavatelli from PWC








